机器人技术与智能系统研究
SLAM与环境建图
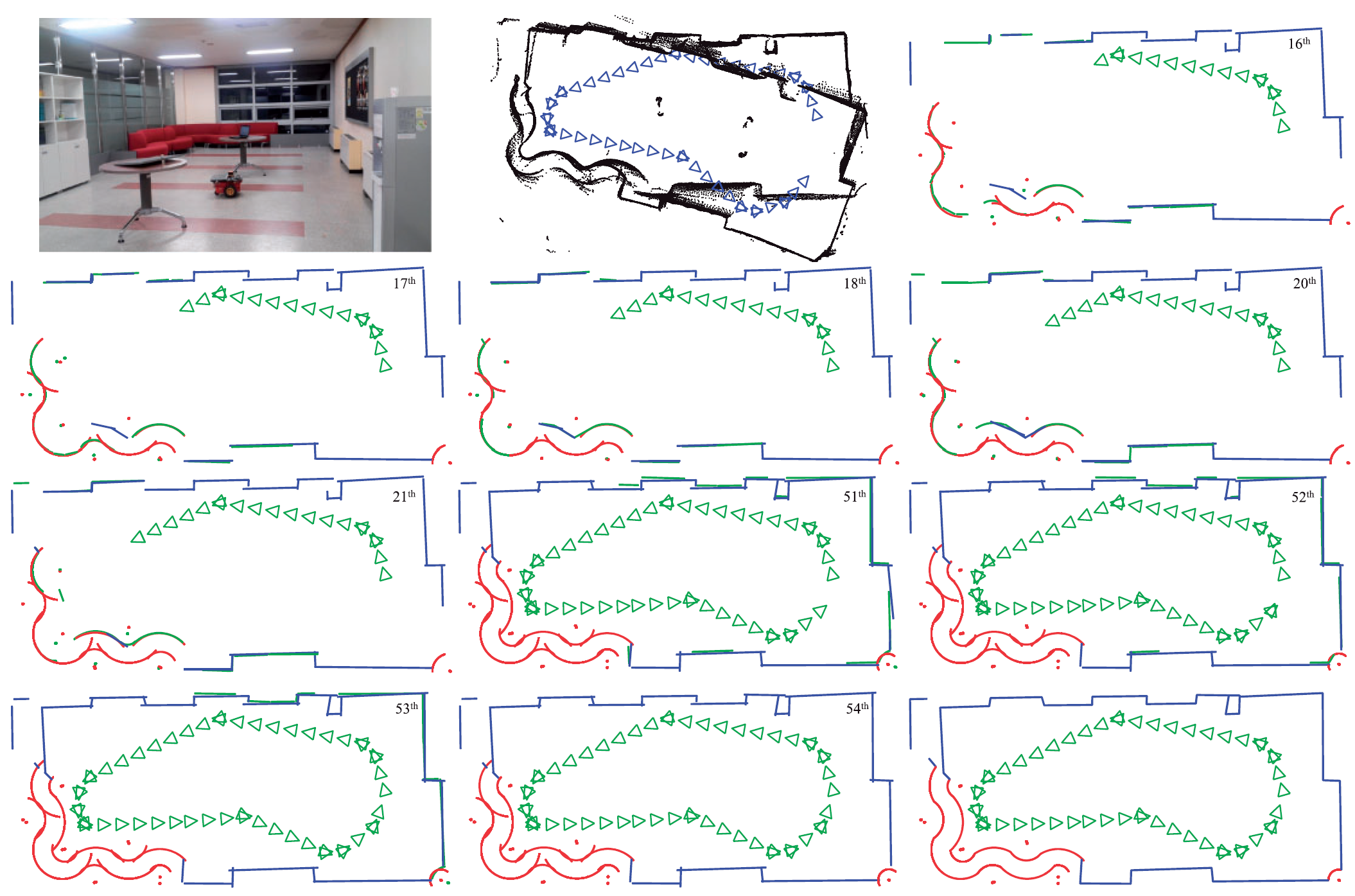
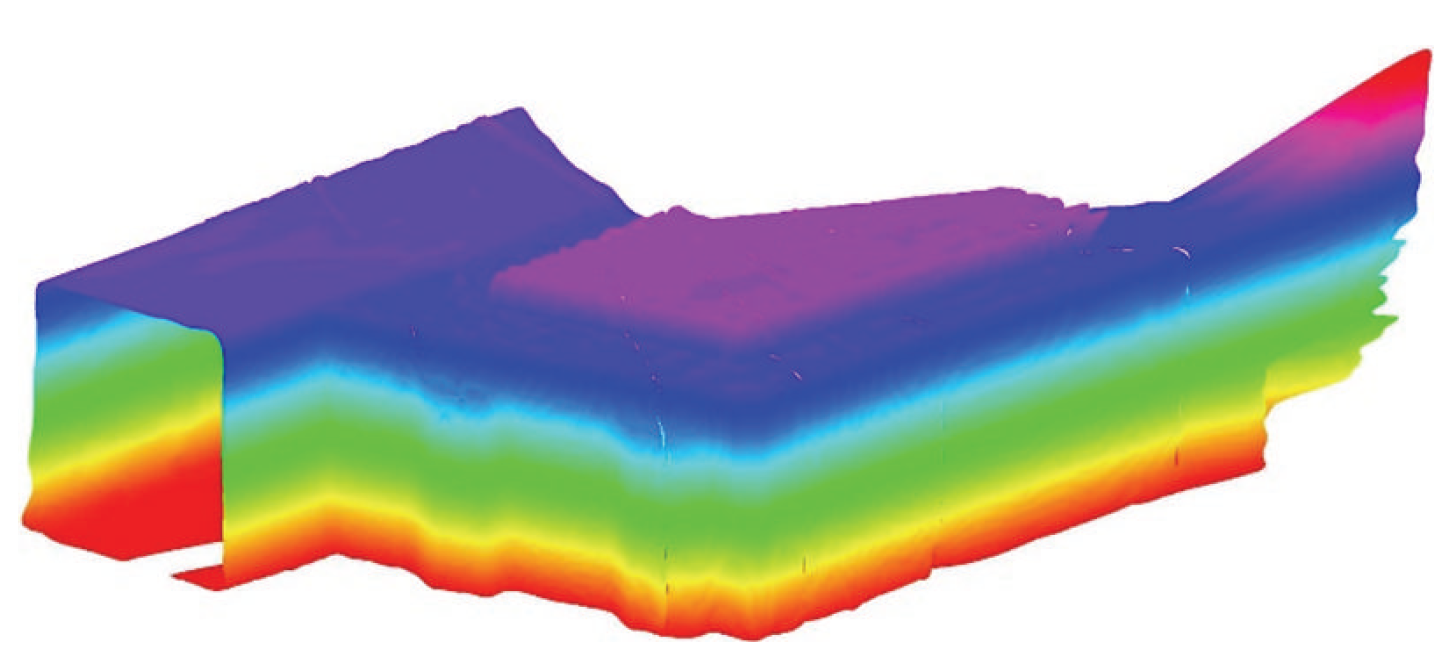
研究移动机器人在未知环境中的同时定位与建图(SLAM)技术,包括自然角点提取、弧线段混合特征匹配、B样条曲面3D环境表示、部分兼容性数据关联等创新算法,显著提升了建图精度与鲁棒性。
机器人路径规划与探索
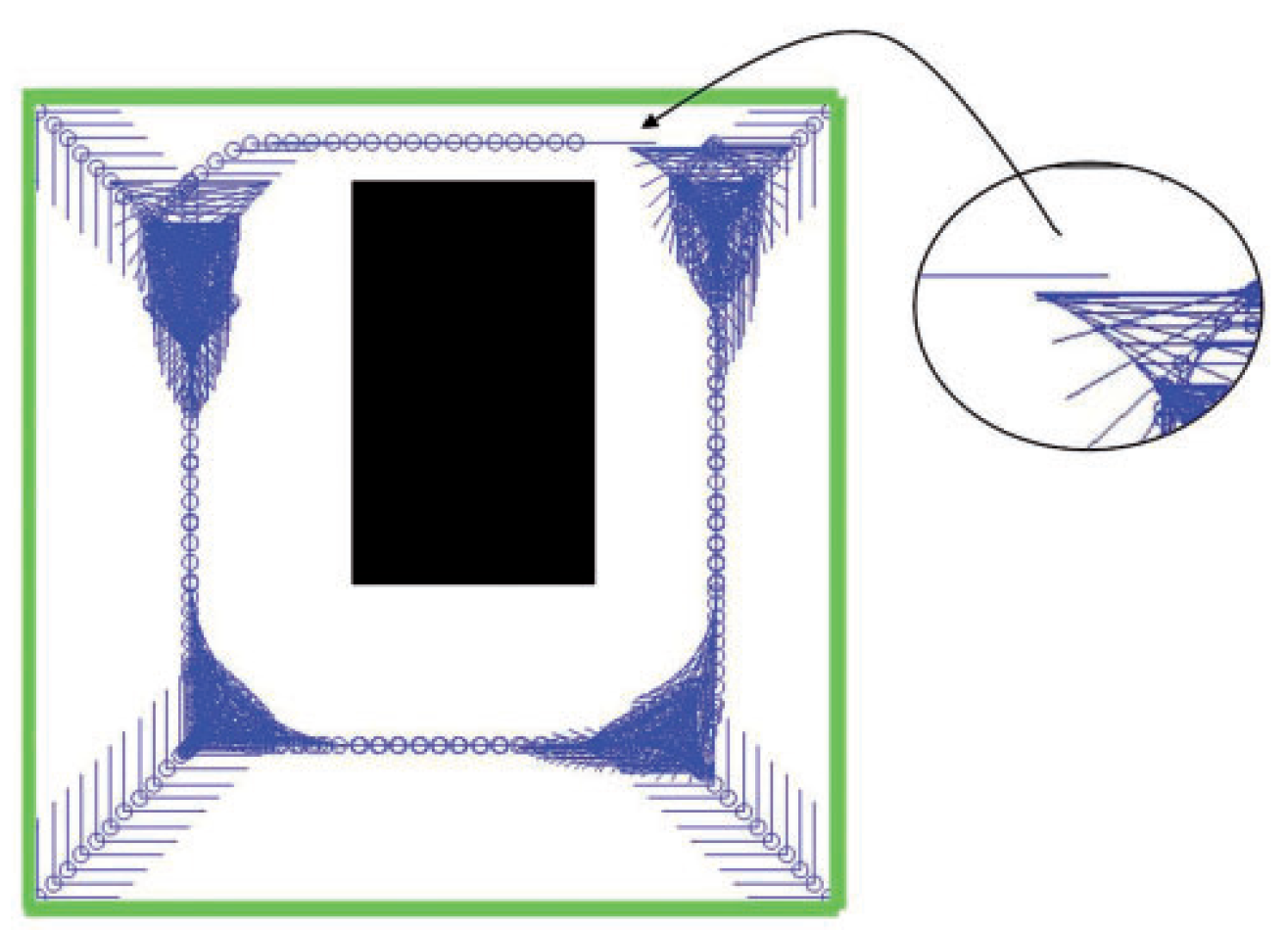
研究基于传感器的未知环境探索与路径规划方法,提出了L²层级广义Voronoi图(L²-HGVG)算法,使双连杆移动机器人仅依靠传感器距离信息即可在未知平面环境中构建路径图,实现自主探索与避障。
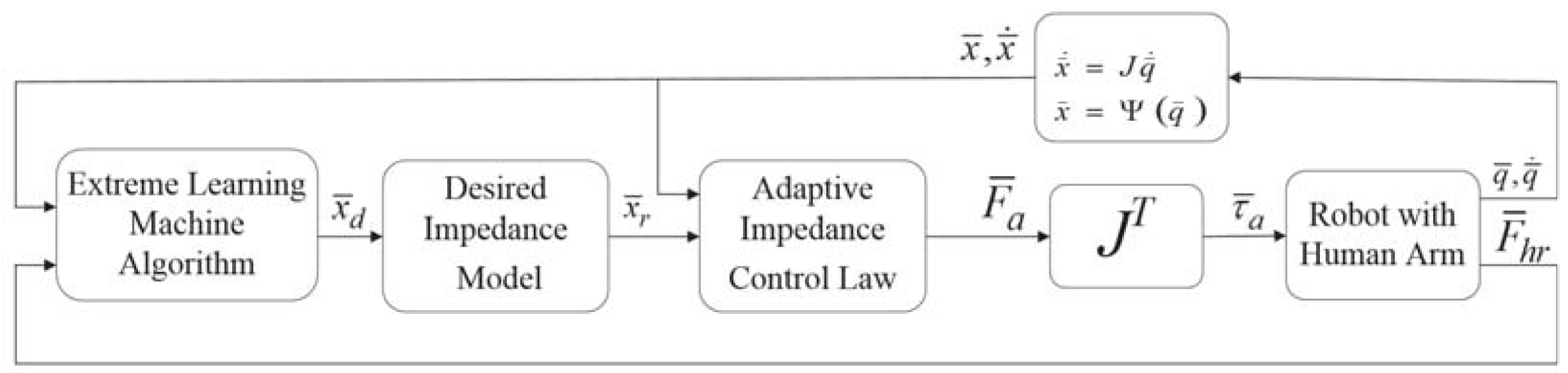
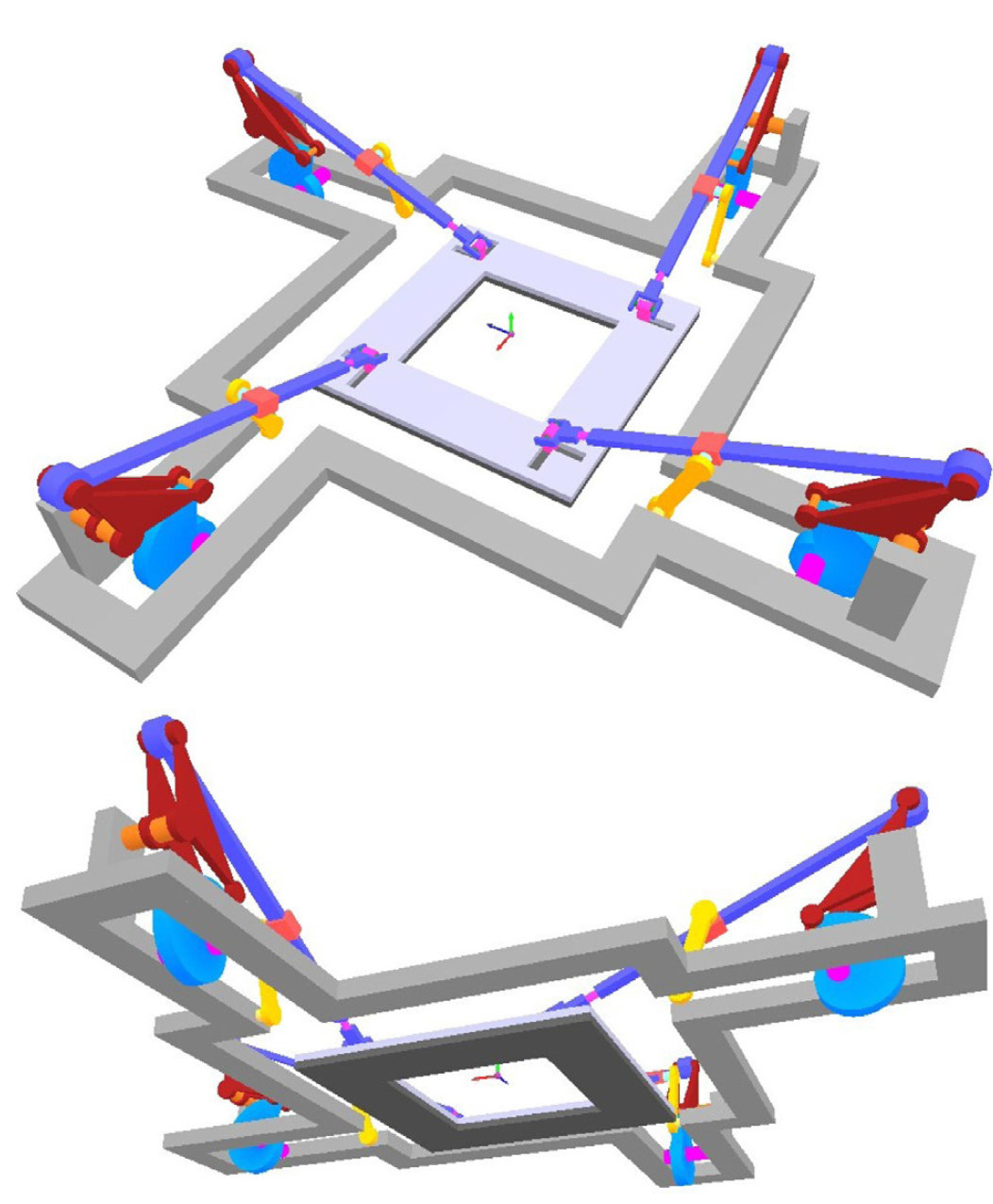
机器人机构设计与智能控制
涵盖康复外骨骼的运动意图估计与柔顺控制、工业机械臂轨迹规划与能耗优化、快动并联机构设计、多线切割机恒张力控制等。提出了鲁棒滑模控制、极限学习机意图估计、自适应阻抗控制等多种创新控制方法。
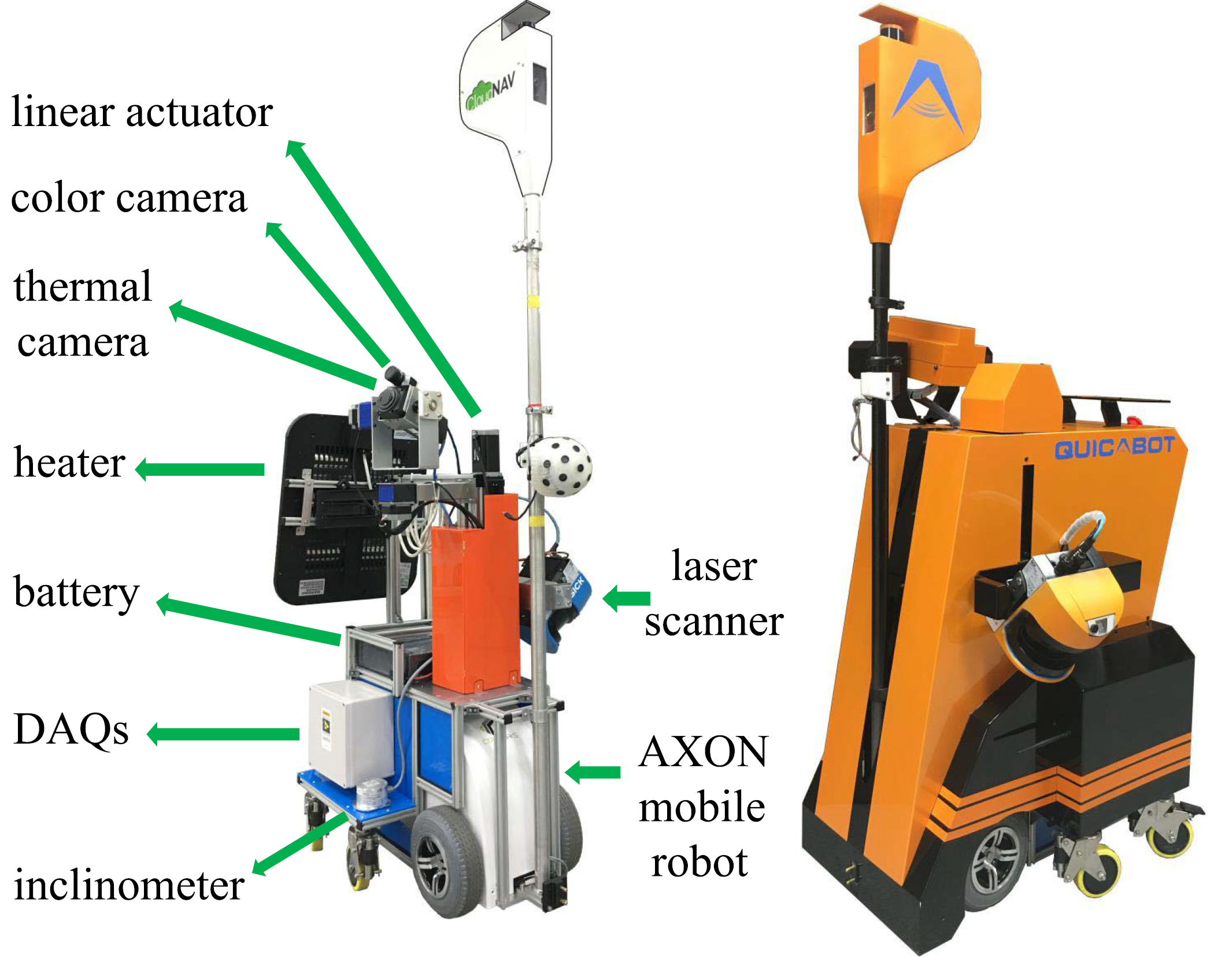
智能检测与建筑质量评估
开发了世界首款全自动建筑质量检测机器人QuicaBot,集成热成像、视觉、激光等多传感器,利用深度学习迁移网络实现裂缝、空鼓、平整度等多缺陷自动检测,检测效率为人工的2倍,精度更高且一致性更好。