Robotics & Intelligent Systems Research
SLAM & Environment Mapping
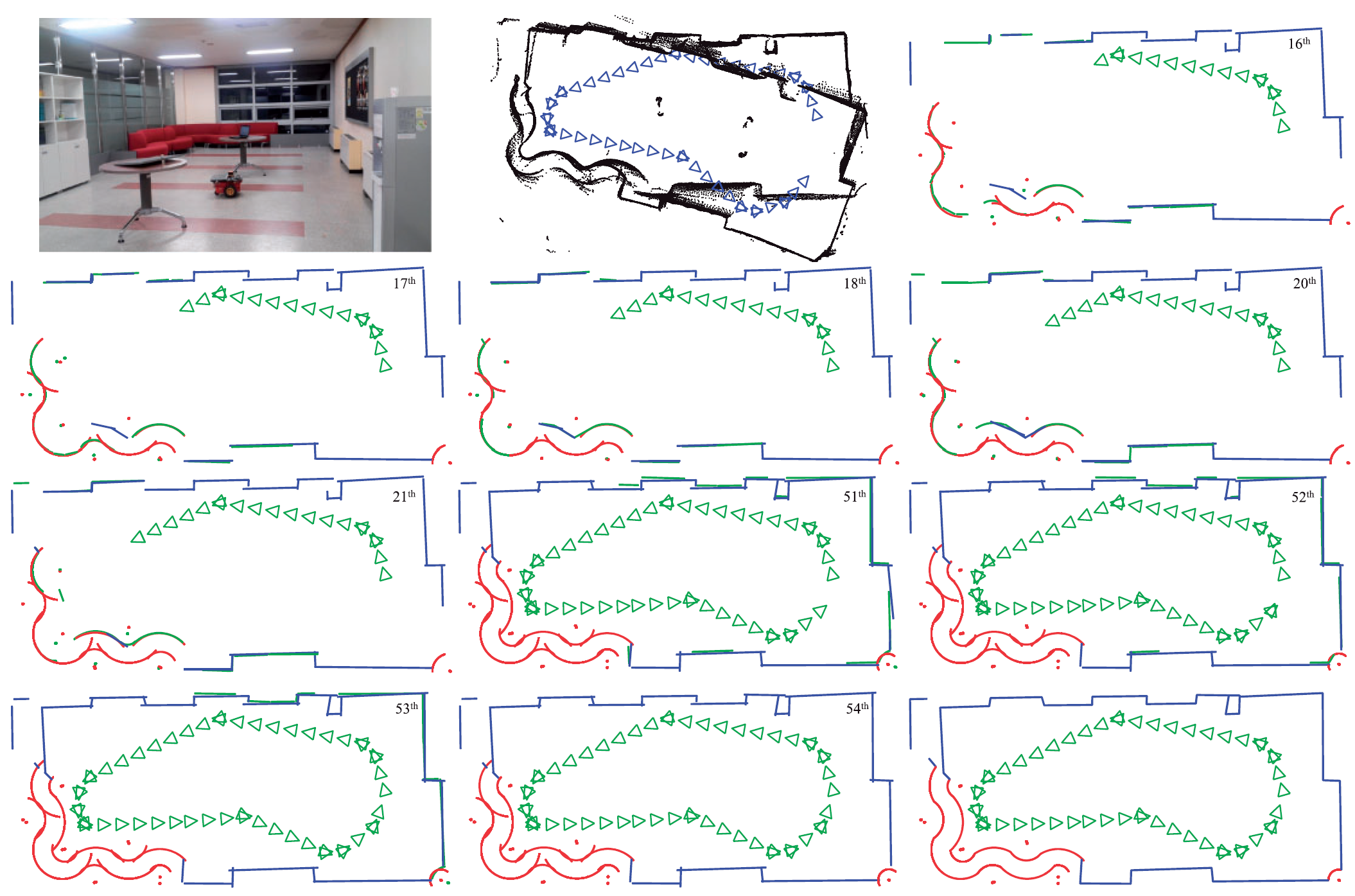
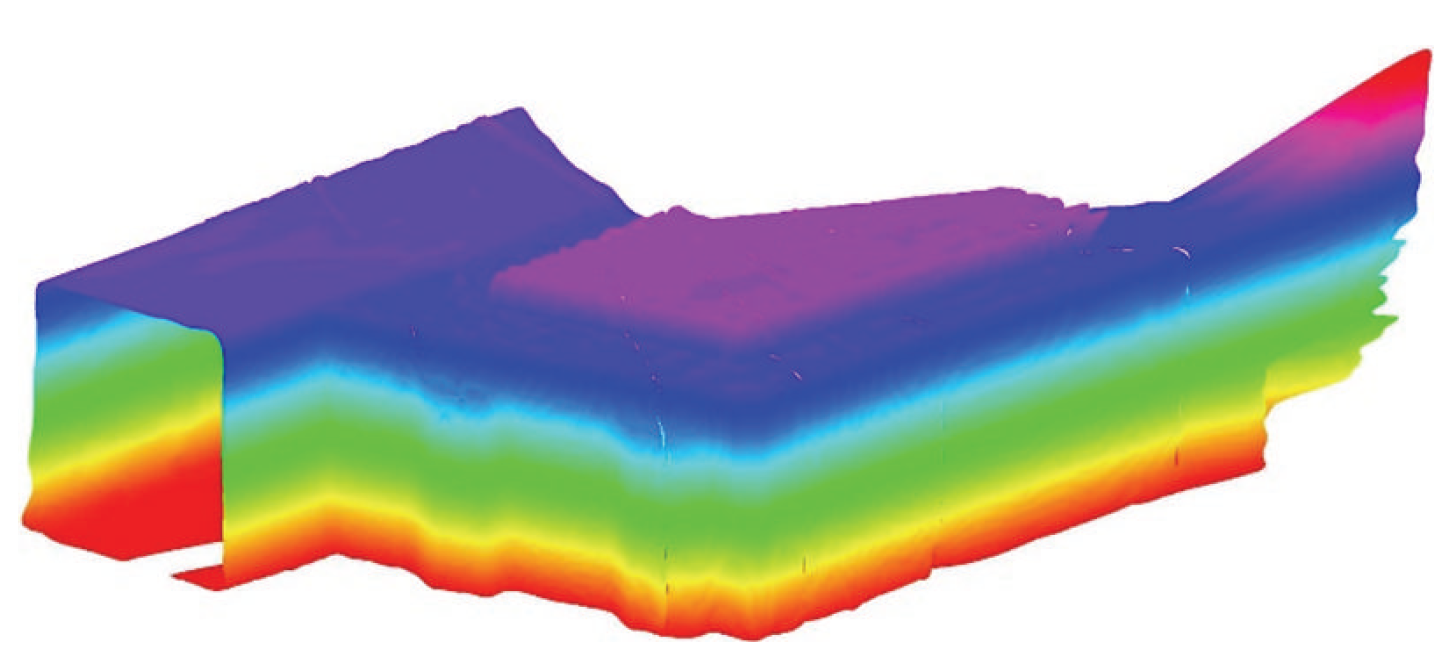
Research on simultaneous localization and mapping (SLAM) for mobile robots in unknown environments, including natural corner extraction, arc–line segment hybrid feature matching, B-spline surface 3D environment representation, and partial compatibility data association algorithms — significantly improving mapping accuracy and robustness.
Robot Path Planning & Exploration
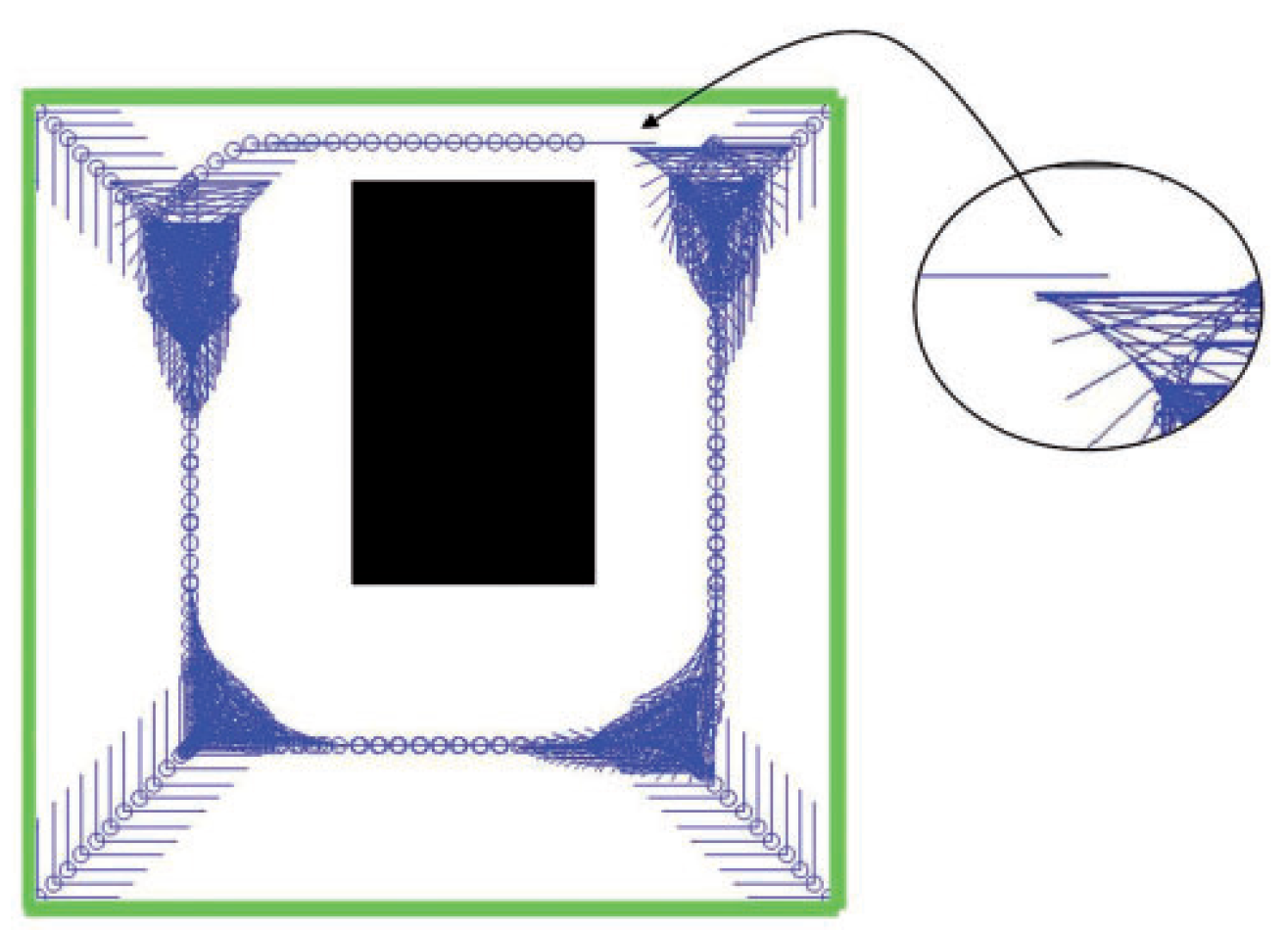
Sensor-based exploration and path planning for unknown environments. Proposed the L²-hierarchical generalized Voronoi graph (L²-HGVG), enabling two-link mobile robots to construct roadmaps using only sensor distance measurements for autonomous exploration and obstacle avoidance.
Robotic Mechanism Design & Intelligent Control
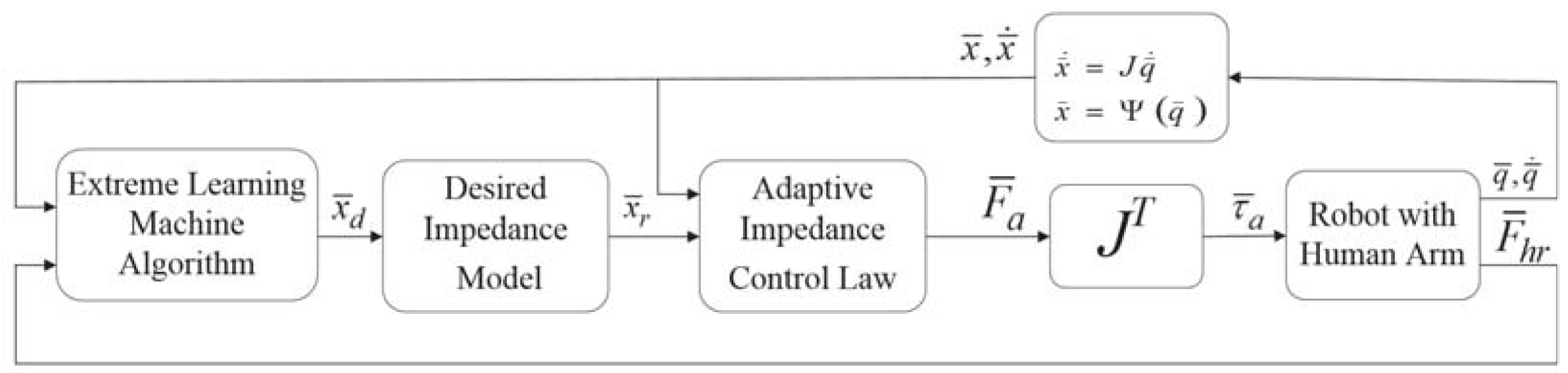
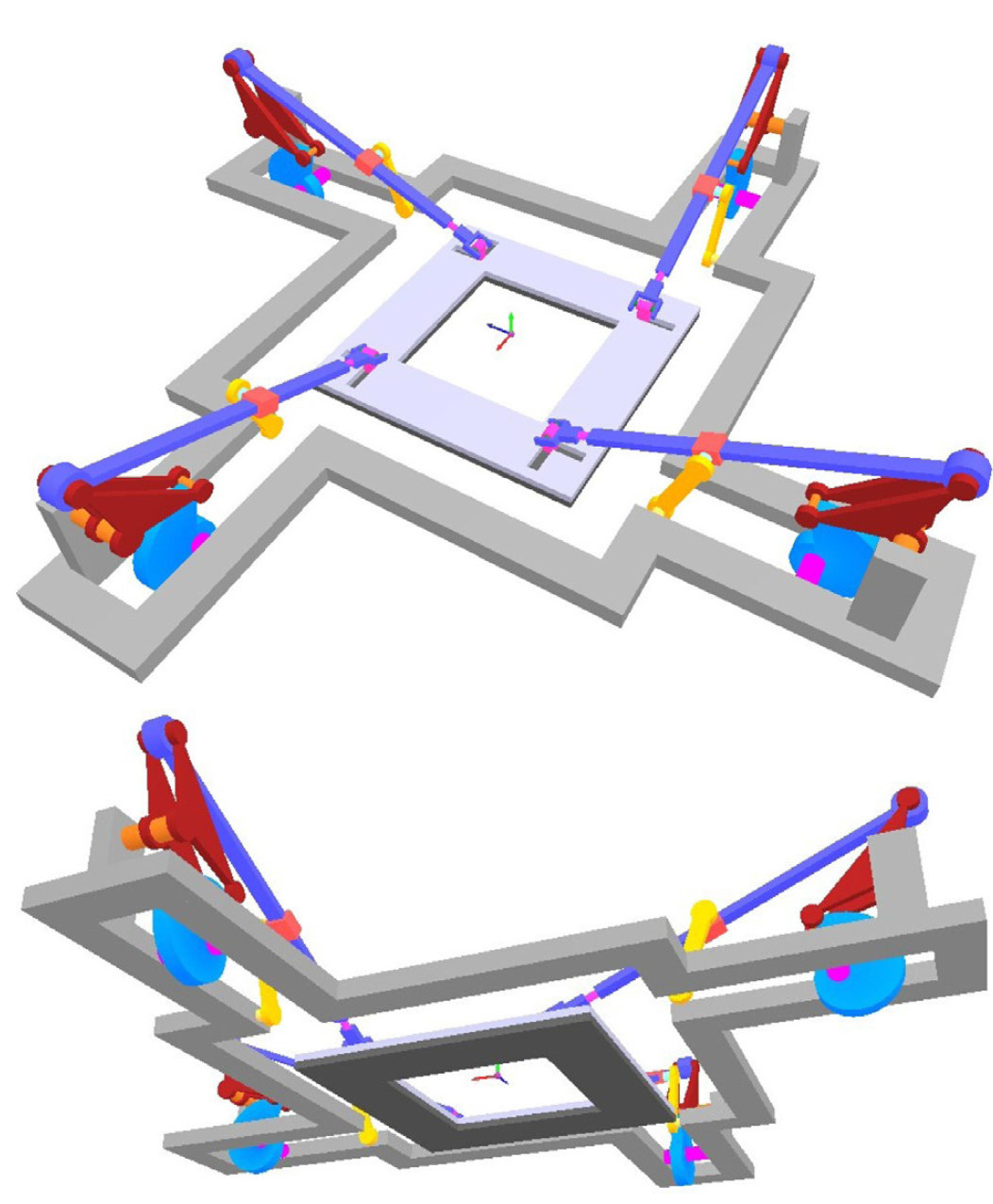
Covers rehabilitation exoskeleton motion intention estimation and compliance control, industrial manipulator trajectory planning for energy minimization, quick-action parallel manipulator design, and multiwire slicer tension control. Proposed robust sliding mode control, extreme learning machine intention estimation, and adaptive impedance control methods.
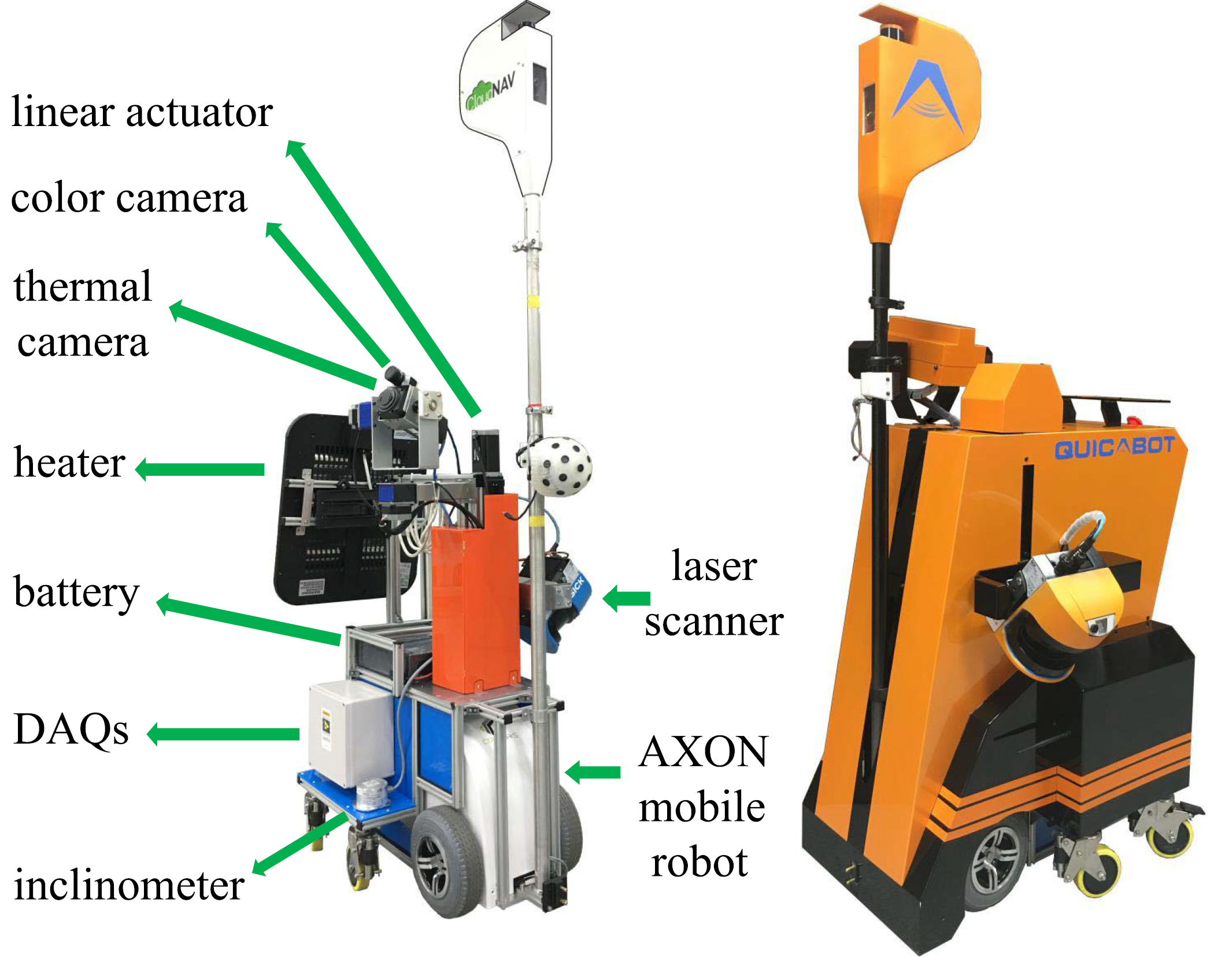
Intelligent Inspection & Building Quality Assessment
Developed QuicaBot — the world's first fully autonomous building quality inspection robot, integrating thermal imaging, vision, and laser sensors with deep learning transfer networks for automated crack, hollowness, and flatness detection. Achieves 2× manual inspection speed with higher accuracy and consistency.