로보틱스 및 지능형 시스템 연구
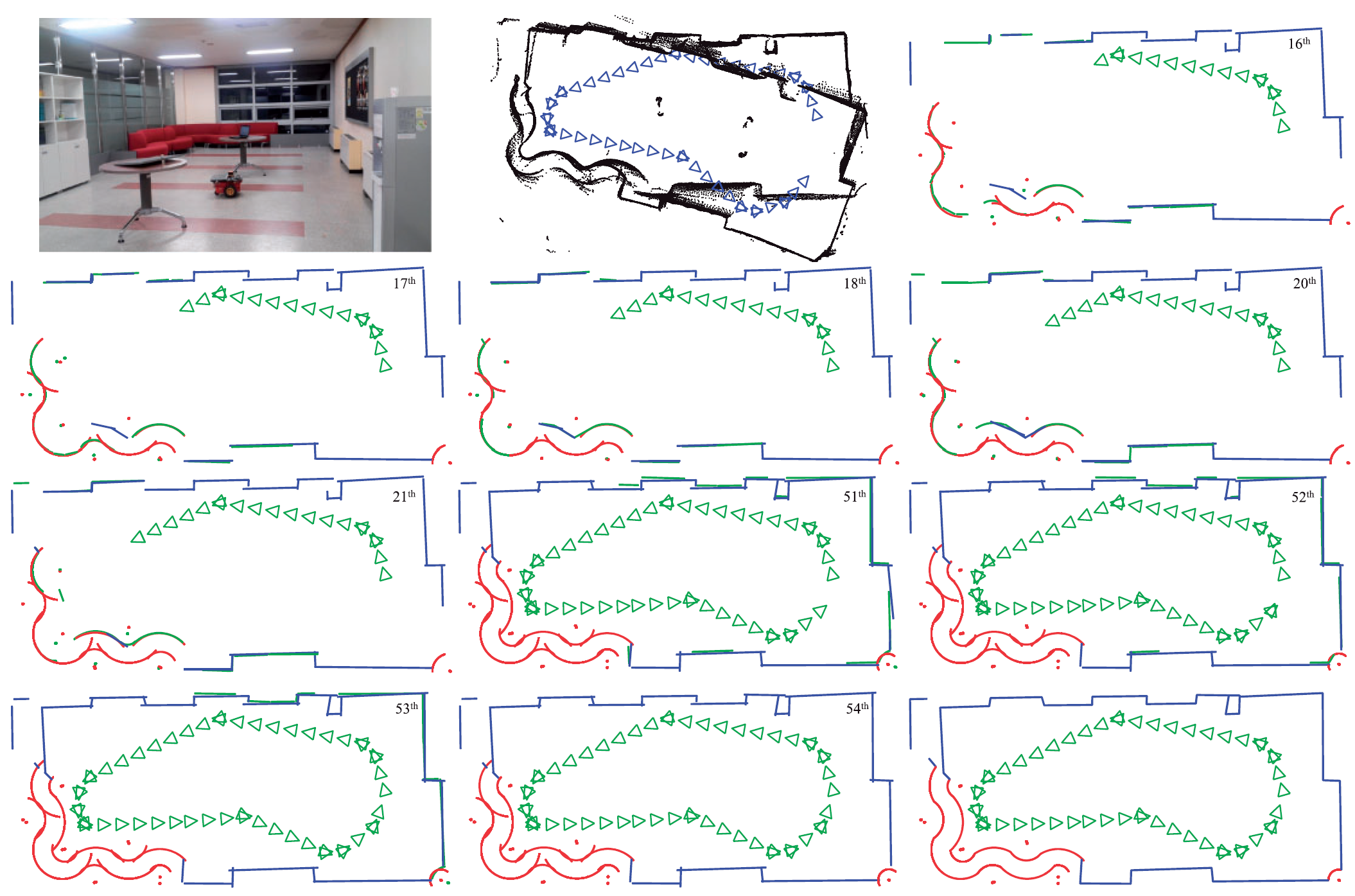
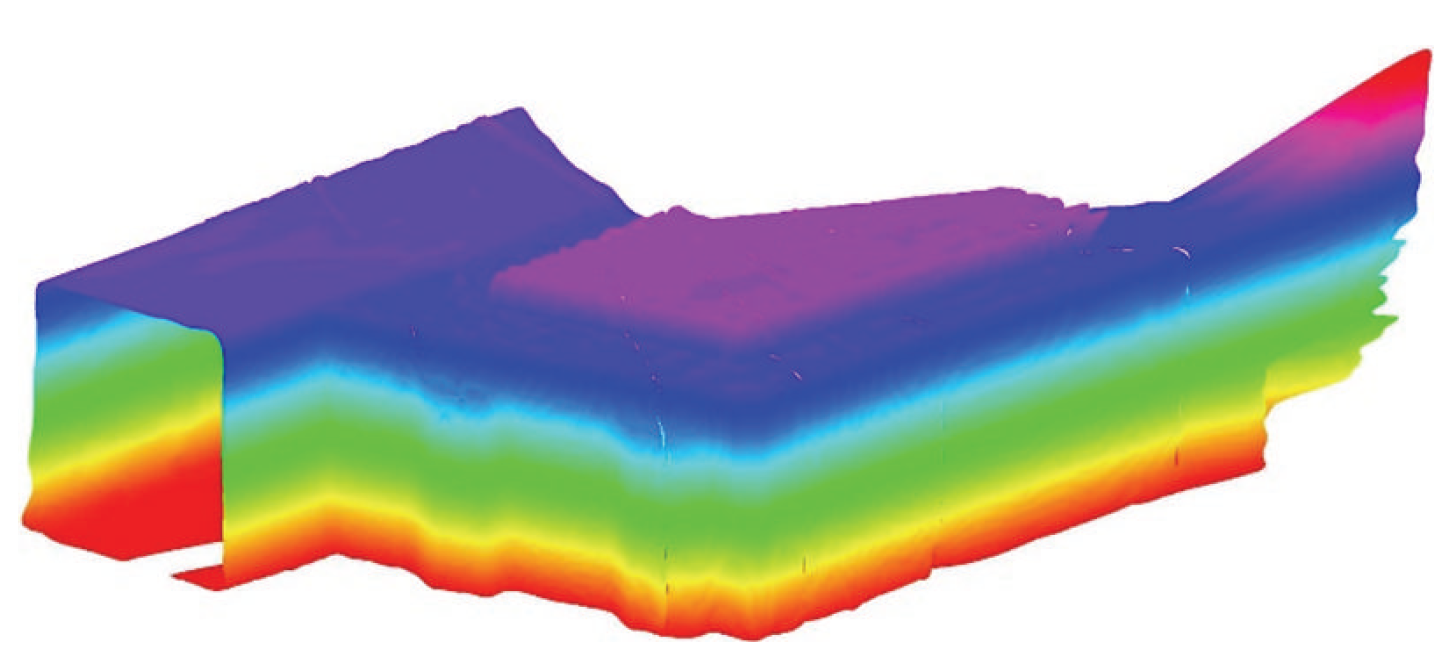
SLAM 및 환경 지도 구축
알 수 없는 환경에서 이동 로봇의 동시 위치 추정 및 지도 구축(SLAM) 기술을 연구합니다. 자연 코너 추출, 아크-선분 혼합 특징 매칭, B-스플라인 곡면 3D 환경 표현, 부분 호환성 데이터 연관 등 혁신 알고리즘을 제안하여 지도 구축 정확도와 강건성을 크게 향상시켰습니다.
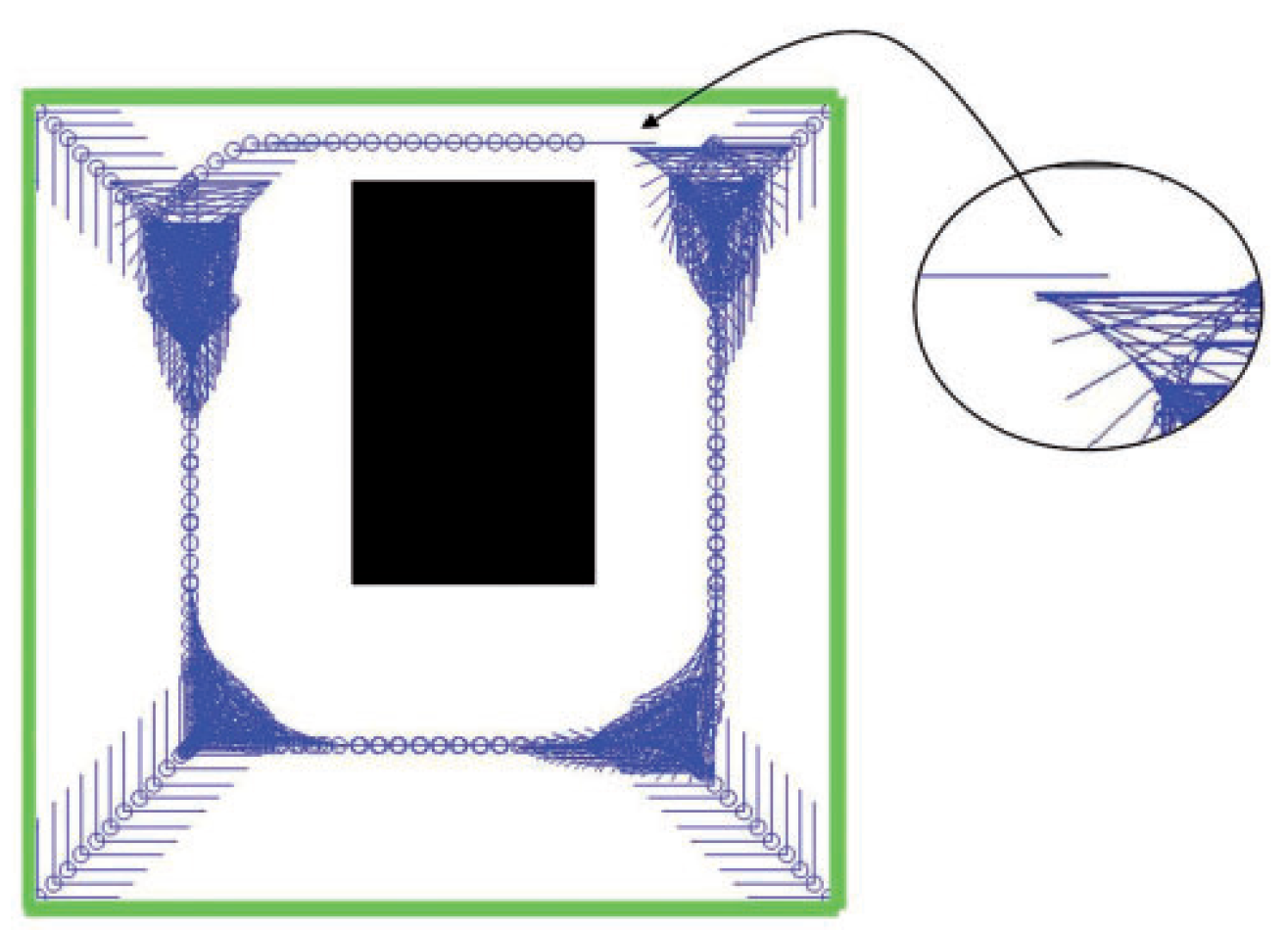
로봇 경로 계획 및 탐색
센서 기반 알 수 없는 환경 탐색 및 경로 계획 방법을 연구합니다. L²-계층화 일반화 Voronoi 그래프(L²-HGVG)를 제안하여 2-링크 이동 로봇이 센서 거리 정보만으로 경로 지도를 구성하고 자율 탐색 및 장애물 회피를 실현합니다.
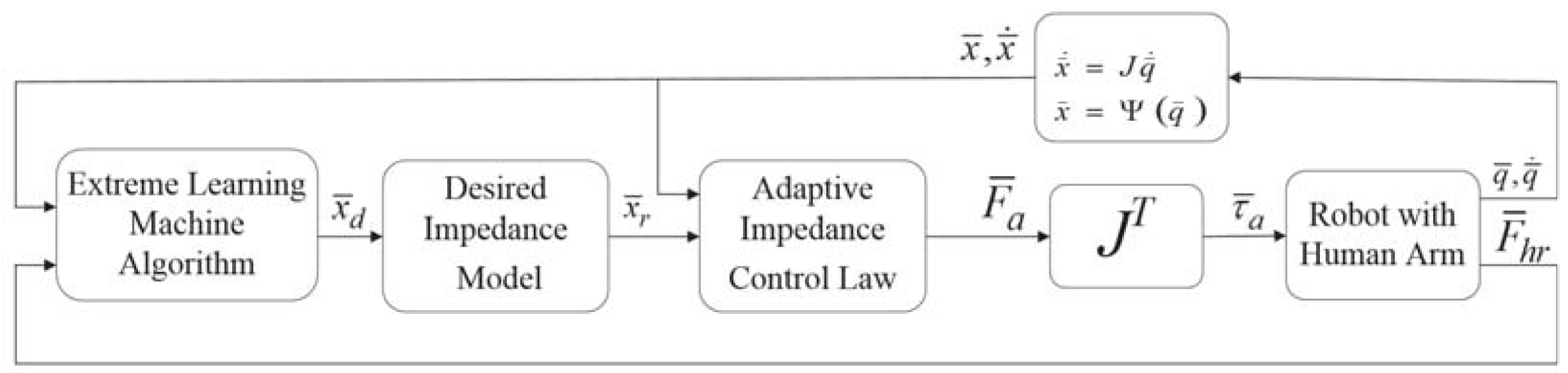
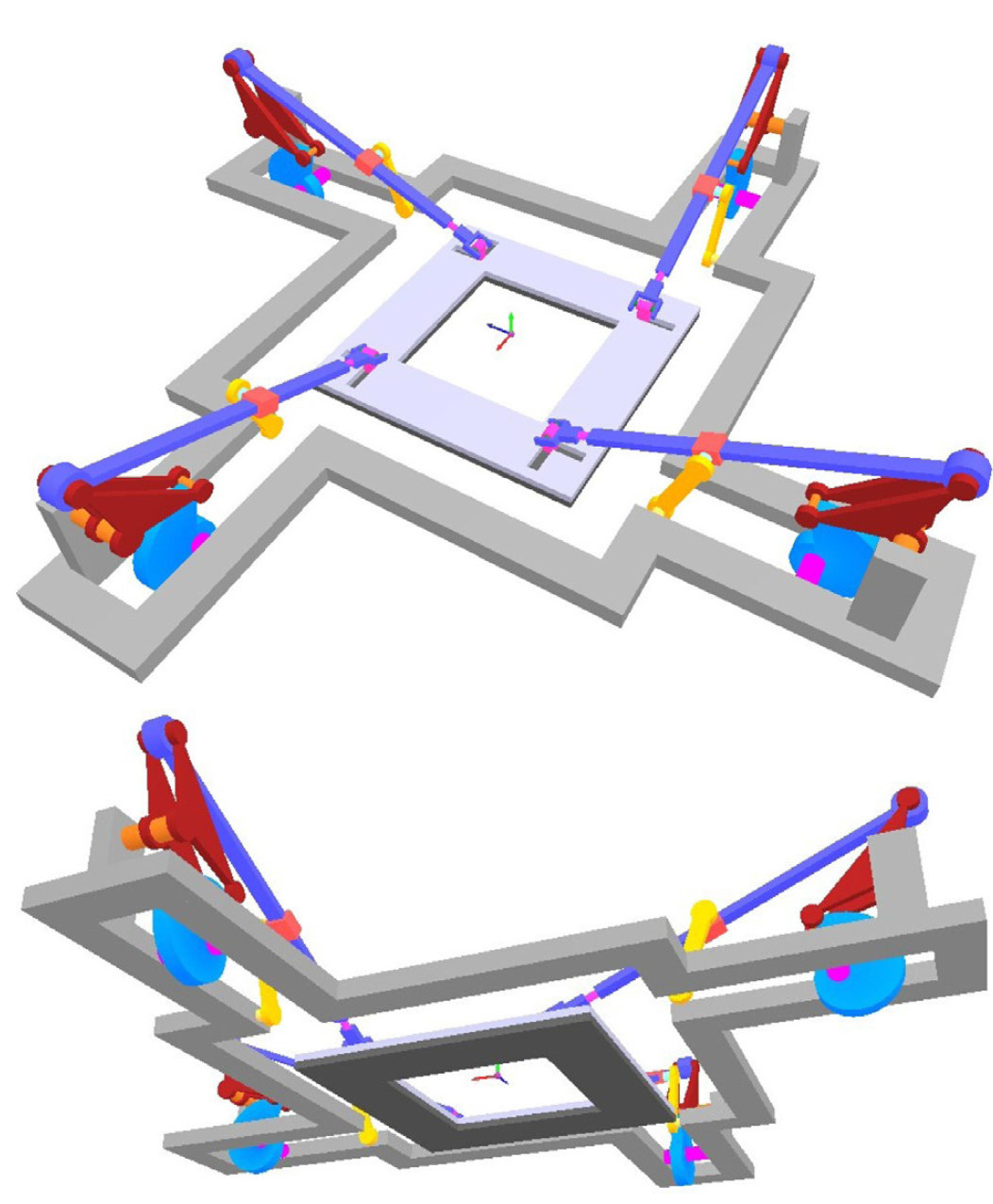
로봇 기구 설계 및 지능 제어
재활 외골격 운동 의도 추정 및 준수 제어, 산업 매니퓰레이터 에너지 최소화 궤도 계획, 고속 캠 연杆 기반 3-DOF 병렬 기구 설계, 다선 슬라이서张力 제어 등을 포함합니다. 강건 슬라이딩 모드 제어, 극한 학습 머신 의도 추정, 적응 임피던스 제어 등 혁신 제어 방법을 제안했습니다.
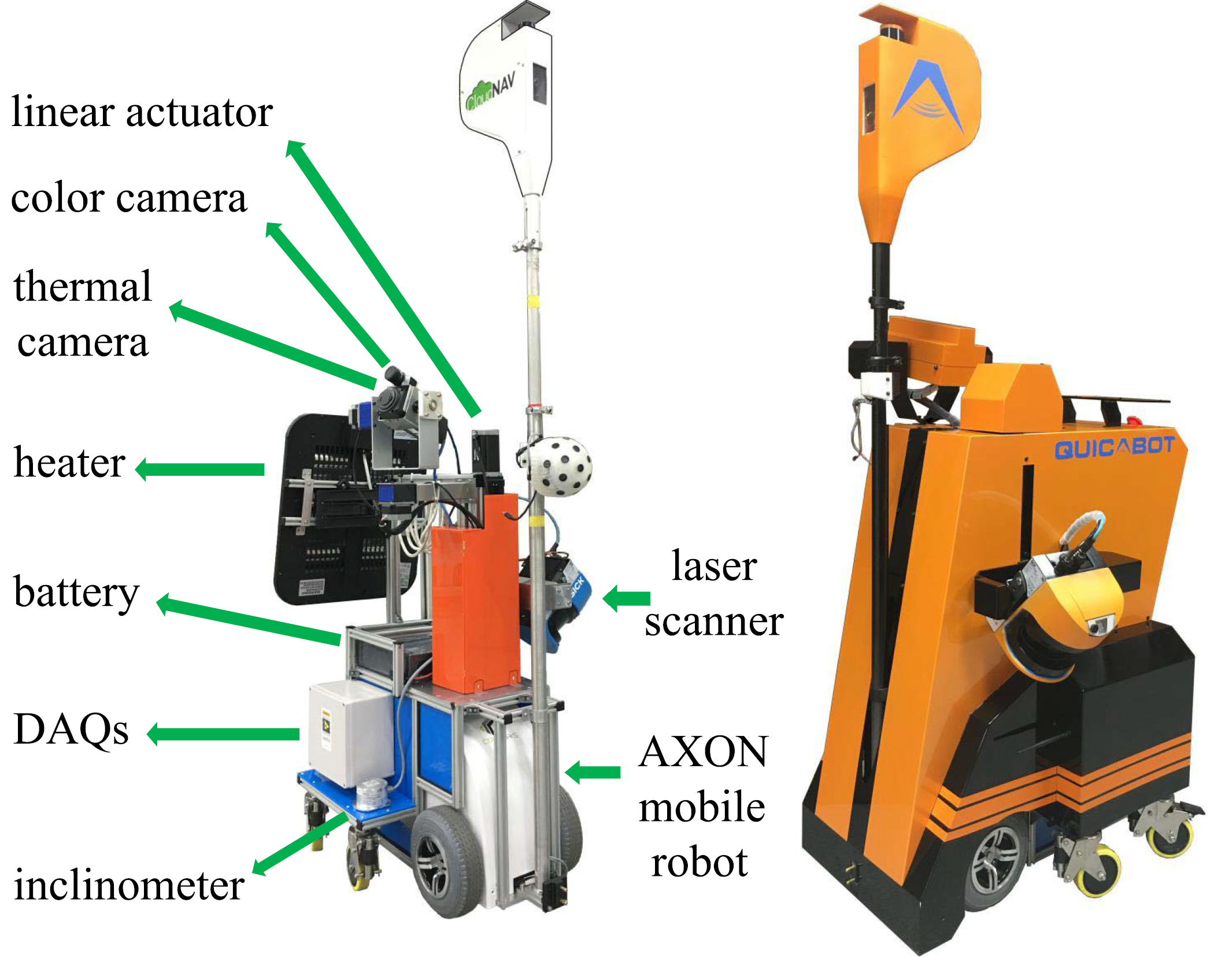
지능 검사 및 건축质量 평가
세계 최초의 전자동 건축质量 검사 로봇 QuicaBot을 개발했습니다. 열화상, 시각, 레이저 센서와 딥러닝 전이 학습 네트워크를 통합하여 균열, 공동, 평탄도 등 다중 결함을 자동 검출합니다. 인력 검사의 2배 속도와 더 높은 정확도 및 일관성을 달성했습니다.